
 产品:9
产品:9
 联系我们
联系我们

SLAMTEC Mapper 手持激光雷达采用高性能 SLAM 图优化引擎及 SharpEdge?精细化建图技术,能主动探测和修正闭环,实现十万平米级高精度建图和定位功能。
以下是一个134m*111m的地下停车场建图效果展示,在手持模式下,SLAMTEC Mapper能“忽略”走路带来的颠簸和轻微的晃动,发挥超高的建图性能。

在遇到长走廊、环路较多、相似的场景时,SLAM过程中难以形成有效的全局匹配参考,从而很容易导致局部区域累计误差无法及时清除,进而导致回环闭合问题。手持激光雷达SLAMTEC Mapper内置第三代SLAM算法,可主动探测闭环和修正地图的能力。
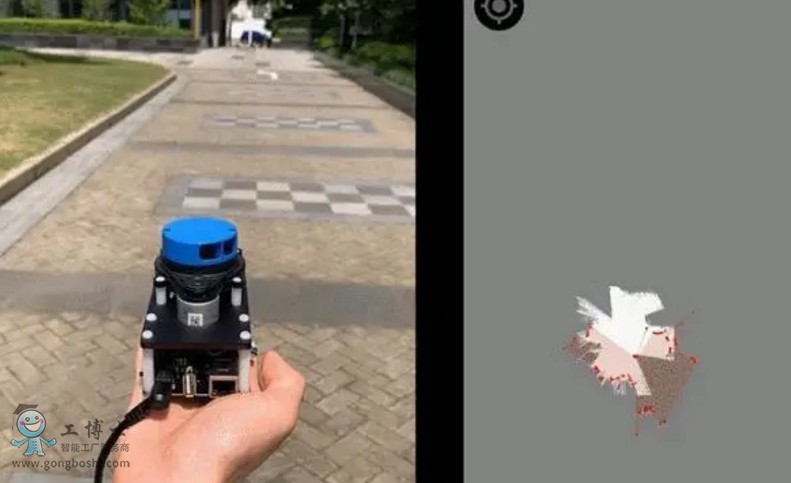
室内外均可使用
SLAMTEC Mapper可实现40米的测距半径,无论是室内还是室外均可使用。即使是在夏季高温环境下建图也依旧稳定。
无论是针对商用、轻工业还是家用场景, SLAMTEC Mapper手持激光雷达均可轻松实现建图。
倾斜补偿、高速移动
SLAMTEC Mapper 无需额外的传感器或数据输入即可进行工作。由于内置了 9 自由度惯性导航系统, SLAMTEC Mapper 可在高低起伏、存在倾角的手持建图模式下正常工作,保证zui佳的建图数据质量。同时,能适应高速移动,zui高支持2m/s的运动速度。

另外,手持激光雷达SLAMTEC Mapper 提供了完善的 SDK 开发包、手机和 PC 端评估工具,方便用户进行扩展开发、数据采集。同时结合配套的 ROS 驱动,产生的地图和定位数据可直接在 ROS 环境中进行使用,全面兼容。
除了自带建图和定位功能外,SLAMTEC Mapper手持激光雷达本身也可作为激光雷达传感器使用,通过 SDK 或 ROS node,快速将激光雷达数据接入用户现有系统之中。
更多资讯:思岚科技
- 下一篇:CTIS2021收官,思岚科技斩获人工智能产品奖
- 上一篇:思岚科技让机器人更快落地